Hola a todos,
En este tutorial vamos a usar una tarjeta de MicroSD con un microcontrolador LPC1114 de la compañia de NXP, ya habiamos realizado algunas practicas halla por los años 2014

, pero ahora hemos de regresar en algo muy bueno ya que con esto podemos realizar DATA LOGGER, donde puede monitorear y siempre estar granado datos en la tarjeta.
Para empear necesitamos tener KEIL ya que es mi pan de cada dia, aunque muchos diran que no es bueno, yo digo todo lo contrario, creo que es un excelente IDE para programar microcontroladores de todas las compañias que utilicen ARM CORTEX.

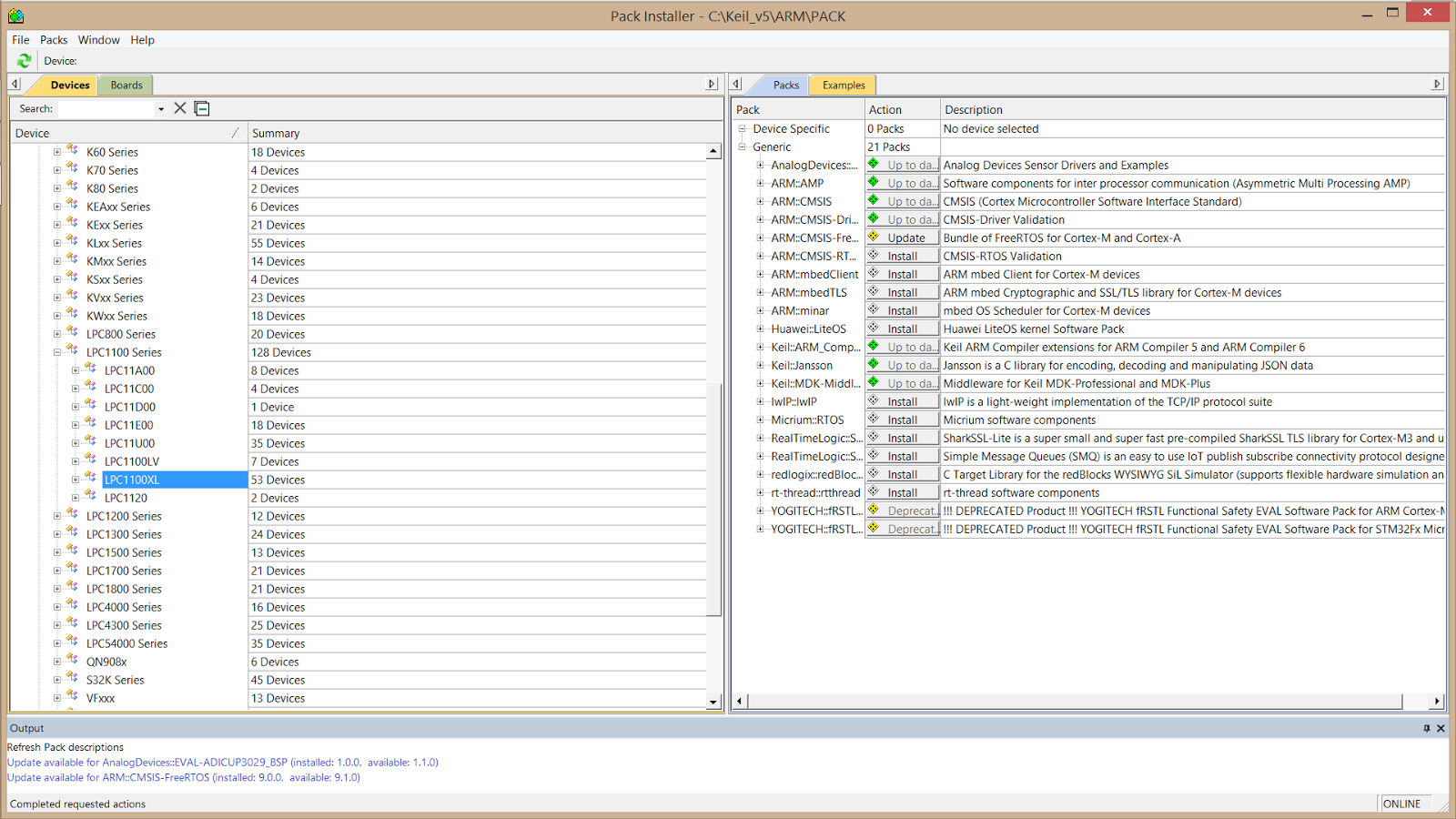
Actualmente esta la version 5.24a con su Pack Installer que nos permite actualizar las librerias de cada microcontrolador de diferentes compañias. Cuando bajas el software de Keil Uvision 5 te pedira registrarte solo es para llevar una contabilizacion de donde y cuales son tus metas al usar la herramienta, al terminar de regitrarte, te enviara a otra pagina donde ya podras instalar el software.
Al instalarse se podra usar por 60 dias en modo profesional, donde no tendras limite de codigo, apaso del los 60 dias se cambiara a modo de evalucion sin limite de tiempo solo que podras debuggear o compilar hasta 32 Kb de ROM (Mas que suficiente para algunos).
Cuando abrimos Keil, nos dirigimos a presionar el boton de Pack Installer para agregar las librerias de los microntroladores LPC11xx.
El codigo mostrado es para poder manejar las tarjetas microSD, se utiliza la libreria de Fatfs Junto con la lirebria de perifericos que ya NXP nos proporciona lo puedes bajar aqui.(Baja la version de LPC11U24 para su correcto funconamiento).
http://elm-chan.org/fsw/ff/00index_e.html#include "chip.h"
#include <stdio.h>
#include <string.h>
#include "SPI_MSD_Driver.h"
#include "diskio.h"
#include "ff.h"
FATFS fs; /* Work area (file system object) for logical drive */
FIL fsrc; /* file objects */
FRESULT res;
UINT br;
char path[512]="0:";
char textFileBuffer[50];
uint16_t data[2];
void __delay_ms(uint32_t time){
for(uint32_t t=time*500000;t>0;t--);
}
int SD_TotalSize(void){
FATFS *fs;
DWORD fre_clust;
res = f_getfree("0:", &fre_clust, &fs); /* ±ØÐëÊǸùĿ¼£¬Ñ¡Ôñ´ÅÅÌ0 */
if ( res==FR_OK )
{
/* Print free space in unit of MB (assuming 512 bytes/sector) */
printf("\r\n%d MB total drive space.\r\n"
"%d MB available.\r\n",
( (fs->n_fatent - 2) * fs->csize ) / 2 /1024 , (fre_clust * fs->csize) / 2 /1024 );
return 1;
}
else
return 0;
}
void Open_Periphericals(void){
Chip_GPIO_Init(LPC_GPIO);
/*Funciones para configurar PINs*/
/*Configuracion de Pines del USART*/
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO1_6, FUNC1);
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO1_7,FUNC1);
/*Configuracion de Pines del ADC*/
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO0_11,FUNC2);
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO1_0,FUNC2);
/*Configuracion de Pines del SSP0*/
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO0_9,FUNC1);
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO0_8,FUNC1);
Chip_IOCON_PinLocSel(LPC_IOCON,IOCON_SCKLOC_PIO2_11);
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO2_11,FUNC1);
/*Configuracion de Pines de GPIO*/
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO1_10,FUNC0);
Chip_GPIO_SetPinDIROutput(LPC_GPIO,1,10);
Chip_IOCON_PinMuxSet(LPC_IOCON,IOCON_PIO1_11,FUNC0);
Chip_GPIO_SetPinDIRInput(LPC_GPIO,1,11);
/*
* Inicializa UART0 a 115200 bps
*
*
*
*/
Chip_UART_Init(LPC_USART);
Chip_UART_SetBaud(LPC_USART,115200);
/*
* Inicializa ADC a 400KSPS
*
*
*
*/
ADC_CLOCK_SETUP_T AdcSetup;
Chip_ADC_Init(LPC_ADC,&AdcSetup);
Chip_SSP_Disable(LPC_SSP0);
Chip_SSP_Init(LPC_SSP0);
Chip_SSP_Enable(LPC_SSP0);
}
int main(void){
SystemCoreClockUpdate();
Open_Periphericals();
/*Main Code Here*/
if( _card_insert() == 0 ){
printf("-- SD card detected OK \r\n");
}
else
{
printf("-- Please connect a SD card \r\n" );
while( _card_insert() != 0 );
printf("-- SD card connection detected \r\n");
__delay_ms(10);
}
f_mount(&fs,"",0);
res = f_open( &fsrc , "Simple20.csv" , FA_CREATE_NEW | FA_WRITE | FA_OPEN_APPEND);
if ( res == FR_OK )
{
/* Write buffer to file */
for(uint32_t cont = 0; cont<50; cont++){
for(uint8_t ADC_Cont = 0; ADC_Cont<2;ADC_Cont++){
Chip_ADC_EnableChannel(LPC_ADC,ADC_Cont,ENABLE);
Chip_ADC_SetStartMode(LPC_ADC,ADC_START_NOW,ADC_TRIGGERMODE_RISING);
while(Chip_ADC_ReadStatus(LPC_ADC,ADC_Cont,ADC_DR_DONE_STAT)==RESET);
if(Chip_ADC_ReadValue(LPC_ADC,ADC_Cont,&data[ADC_Cont]) == ERROR){
printf("Error\r\n");
}
Chip_ADC_EnableChannel(LPC_ADC,ADC_Cont,DISABLE);
}
sprintf(textFileBuffer,"%u,%u\r\n",data[0],data[1]);
res = f_write(&fsrc, textFileBuffer,(unsigned) strlen(textFileBuffer), &br);
if(res == FR_OK){
printf("Simple20.csv successfully created %u,%u\r\n",br,cont);
}else{
printf("Simple20.csv successfully created with some Error %u\r\n",res);
}
__delay_ms(10);
}
}
else if ( res == FR_EXIST )
{
printf("Demo.TXT created in the disk \r\n");
}
f_close(&fsrc);
SD_TotalSize();
f_mount(0,"",0);
for(;;){
}
return 1;
}El diagrama es el siguiente:
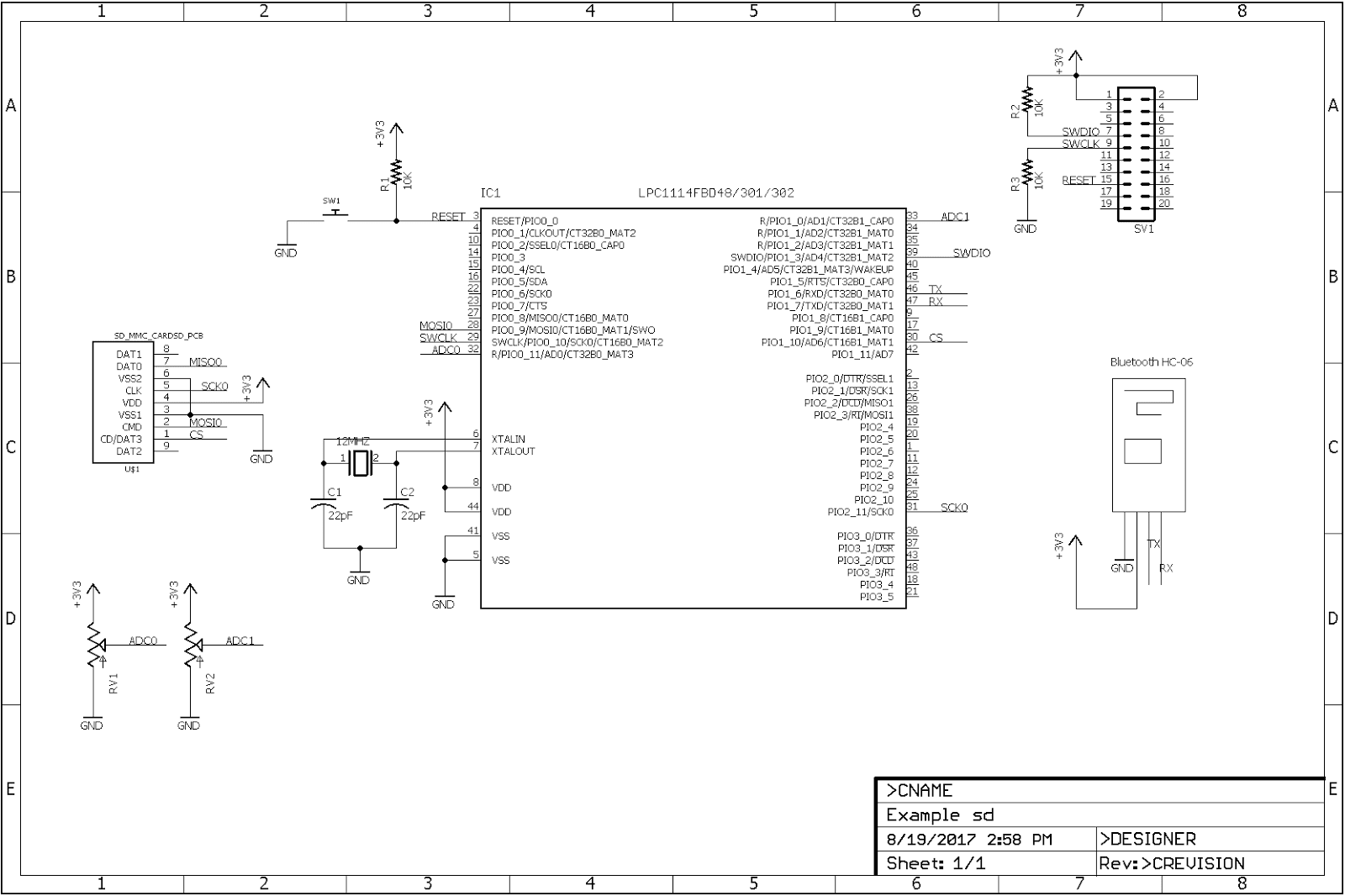
Se ha adherido algunos ejemplos para que el usuario pueda implementarlos en sus proyectos
https://drive.google.com/drive/folders/0B5PHuBzaImxfbktlVU9wTzJjYkk?usp=sharing¡Saludos!


